Hello, everyone. Welcome back to my blog. In this article, I will discuss the Kalman filter applications in ADAS (Advanced Driver Assistance Systems), and provide a brief explanation of each application.
Ask questions if you have any electrical, electronics, or computer science doubts. You can also catch me on Instagram – CS Electrical & Electronics
Also, read:
- Top 10 Software-Defined Vehicle (SDV) Project Ideas To Build In 2025
- Top 10 Software-Defined Vehicle (SDV) Projects You Should Know About
- The Future Of Battery Management Systems In The Era Of Software Defined Vehicles
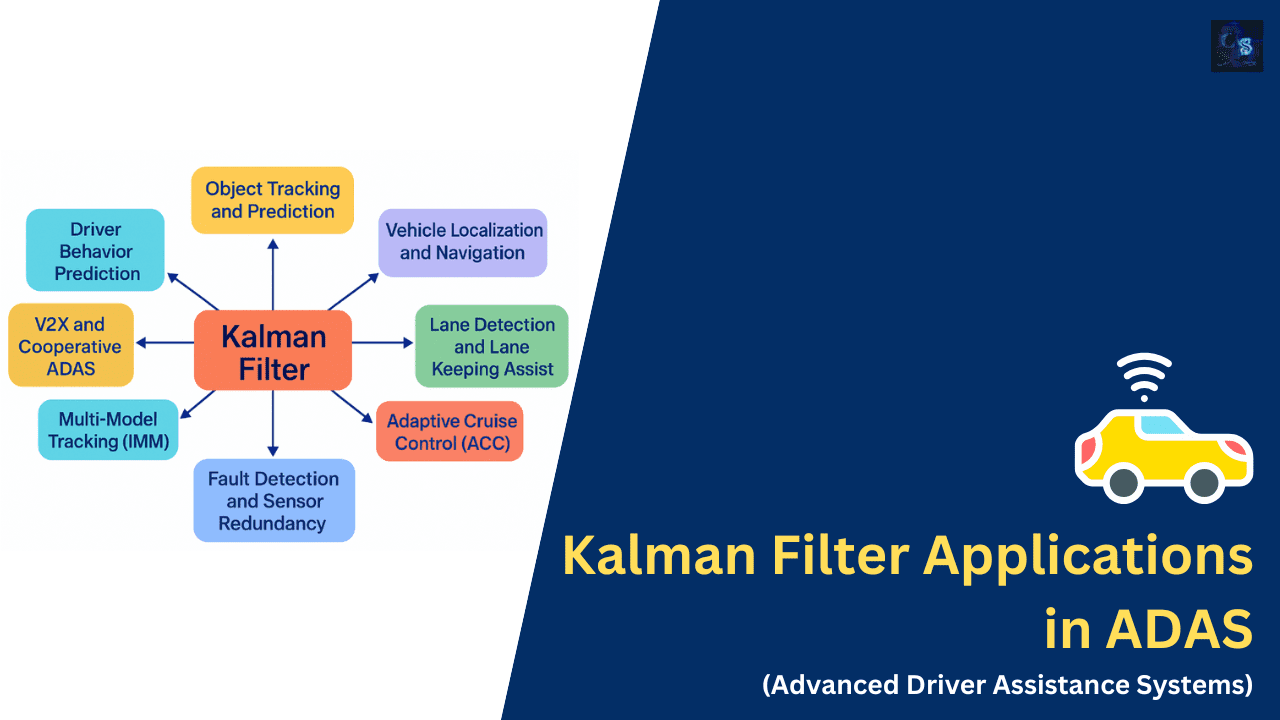
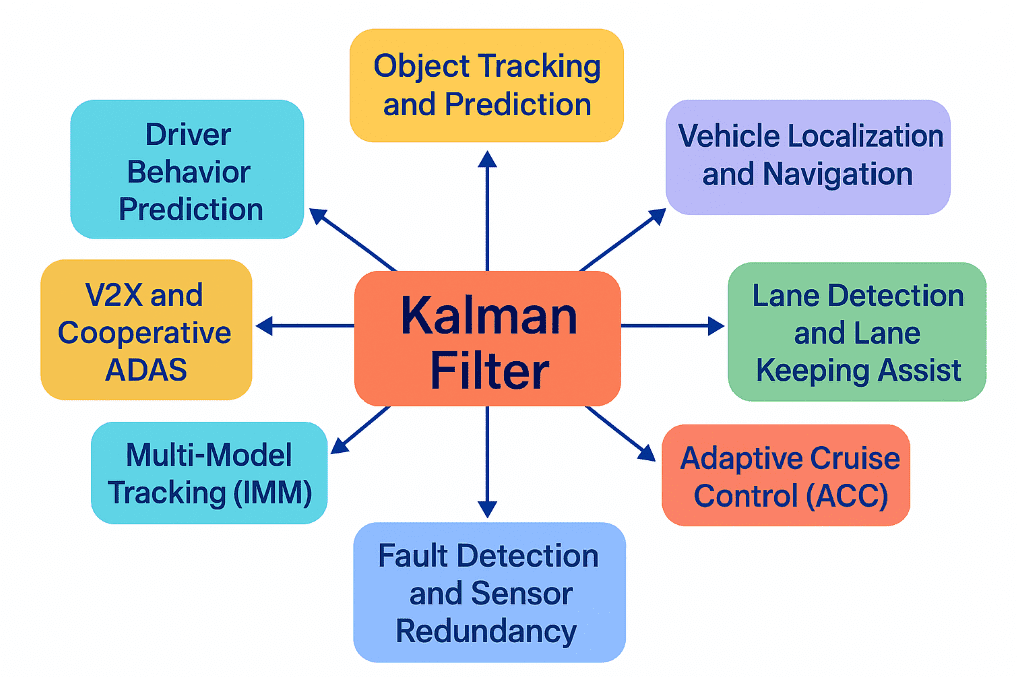
Kalman Filter Applications in ADAS
As automotive technology advances toward higher levels of automation, the role of Advanced Driver Assistance Systems (ADAS) has become increasingly vital in ensuring road safety and comfort. ADAS leverages an array of sensors and software to provide functionalities such as adaptive cruise control, lane keeping, collision avoidance, and driver monitoring. However, the sensor data acquired in these systems is often noisy, incomplete, or inconsistent due to environmental conditions or hardware limitations. To handle such uncertainties and extract reliable information, engineers employ estimation algorithms, with the Kalman Filter (KF) being one of the most powerful among them.
Originally developed for aerospace and navigation, the Kalman Filter is a recursive mathematical algorithm that estimates the internal state of a process using a series of measurements observed over time, even when the measurements contain random errors or missing data. The algorithm optimally fuses data from various sources and predicts the current state of a system. In the context of ADAS, this allows the system to make intelligent and real-time decisions with high confidence, even in challenging driving environments such as poor lighting, adverse weather, or high-speed motion.
By continuously updating predictions and correcting them using sensor feedback, the Kalman Filter maintains a reliable and smooth flow of information for the vehicle’s control system. It forms the computational backbone for a range of ADAS features, from object tracking to localization. The following sections detail key applications of Kalman Filters in ADAS and how they contribute to enhancing vehicle perception, navigation, and driver interaction.
01. Sensor Fusion for Object Tracking
Modern vehicles are equipped with multiple sensors such as cameras, radar, LiDAR, and ultrasonic detectors to perceive their surroundings. However, each of these sensors has different strengths and weaknesses. Cameras may perform poorly in fog or at night, while radar may struggle with small objects. Kalman Filters are used to fuse the outputs from all these sensors, creating a unified, accurate model of nearby objects. This sensor fusion capability is especially critical for object tracking applications in ADAS.
The Kalman Filter continuously refines the state of detected objects—such as their position, velocity, and acceleration—by comparing expected outcomes with new sensor data. This enables the vehicle to follow the movement of surrounding vehicles, cyclists, and pedestrians with a high level of accuracy. The filter is robust to temporary sensor failures or occlusions, allowing tracking to continue even when visibility is partially lost.
This real-time tracking is essential for safety-critical features like forward collision warning, emergency braking, and cross-traffic alert. Without reliable object tracking, the system could produce false positives or miss a potential collision scenario. Kalman Filters ensure smoother object trajectories and filter out erratic movements caused by sensor noise.
Key Points:
- Fuses data from multiple sensors to form a consistent object model.
- Maintains accurate tracking even with momentary sensor dropout.
- Reduces noise and uncertainty in object position and velocity.
- Enhances the reliability of collision avoidance and blind-spot systems.
- Supports multi-object tracking for complex traffic environments.
02. Lane Keeping and Road Edge Detection
Lane Keeping Assist (LKA) systems are designed to help the vehicle remain centered in its lane. These systems rely heavily on visual input from cameras to detect road markings. However, in many real-world scenarios, such as faded lines, construction zones, or poor lighting, these markings can be unreliable. Kalman Filters are used to smooth and predict the lane boundaries based on previous frames and vehicle motion, improving the robustness of the system.
Even if lane markings disappear temporarily due to occlusion or surface wear, the Kalman Filter can estimate their position by using vehicle speed, steering angle, and yaw rate. The predictive modeling ensures that the system continues to provide lane information to the control system during temporary visual interruptions.
The Kalman Filter also accounts for road curvature and varying slopes, enabling the vehicle to adapt its path dynamically. This improves the precision of lane centering systems and helps prevent false lane departure warnings. It also enables smoother lateral control, especially on highways and curvy roads.
Key Points:
- Filters and predicts lane lines in poor or missing marking conditions.
- Integrates IMU and camera data for continuous lane estimation.
- Adapts to road curvature and elevation changes.
- Minimizes false alerts and erratic steering corrections.
- Enhances driver trust in semi-autonomous lane-keeping features.
03. Adaptive Cruise Control and Speed Regulation
Adaptive Cruise Control (ACC) is a widely adopted ADAS feature that adjusts the vehicle’s speed to maintain a safe distance from the vehicle ahead. However, sensor readings from radar or LiDAR can fluctuate due to environmental factors or sudden braking by other vehicles. Kalman Filters are implemented in these systems to smooth out the noisy measurements and provide reliable distance and velocity estimates.
With the help of Kalman Filtering, the ACC system can anticipate the relative motion of other vehicles. This predictive ability allows for more gradual and comfortable acceleration or deceleration, avoiding abrupt changes that could startle passengers. It also improves fuel efficiency by reducing unnecessary throttle and brake usage.
Furthermore, Kalman Filters allow the vehicle to respond appropriately when a lead vehicle abruptly enters or leaves the lane. The system predicts whether a sudden change is temporary or long-term and adjusts accordingly. This helps in maintaining consistent driving behavior and enhances overall road safety.
Key Points:
- Stabilizes noisy radar inputs for consistent vehicle-following behavior.
- Predicts relative motion for proactive speed adjustments.
- Improves comfort by avoiding sudden acceleration or braking.
- Handles cut-ins and cut-outs by neighboring vehicles intelligently.
- Enhances fuel efficiency by optimizing throttle and brake usage.
04. Vehicle Localization and Navigation
Accurate localization is essential for autonomous driving and high-level ADAS functions such as path planning and automatic lane changes. While GPS offers global positioning, its accuracy can degrade in urban canyons, tunnels, or during signal loss. Kalman Filters play a key role in fusing GPS data with inputs from IMU, wheel odometry, and visual odometry to provide robust and accurate localization.
Kalman Filters can correct errors such as GPS drift by using dead-reckoning techniques and sensor feedback. For instance, when the GPS signal is weak or lost, the filter uses IMU data to estimate the vehicle’s position and correct it once the GPS becomes available again. This allows the vehicle to navigate seamlessly across different terrains and environments.
In high-definition map-based navigation, the accuracy requirement is often down to the lane level. Kalman Filters support this need by continuously refining the position estimate with respect to landmarks and road features, enabling precise guidance for automated maneuvers.
Key Points:
- Combines GPS, IMU, and odometry data for robust vehicle localization.
- Maintains accuracy in GPS-denied environments.
- Corrects accumulated drift and improves path tracking.
- Enables lane-level precision in navigation systems.
- Critical for map-based autonomous path planning.
05. Driver Behavior Prediction and Risk Estimation
As vehicles evolve toward higher autonomy, understanding and predicting driver behavior becomes increasingly important for safety. Kalman Filters are used to monitor and analyze driver inputs such as steering, throttle, brake pressure, and even eye/head movement from camera-based systems. This data is used to predict intent and identify potentially risky behavior.
By modeling driver actions over time, Kalman Filters can detect patterns that indicate fatigue, distraction, or aggressive driving. The system can then provide alerts, engage semi-autonomous control, or prepare emergency safety responses if necessary. This predictive analysis ensures that the vehicle is ready to intervene or assist when the driver is not in optimal condition.
These behavior models also enable smooth transitions between manual and autonomous modes by anticipating driver actions. This ensures that control is transferred safely and comfortably, reducing the risk of confusion or error.
Key Points:
- Monitors and predicts driver intent using control input data.
- Enhances detection of distraction, fatigue, or drowsiness.
- Supports intelligent alerts and safety interventions.
- Aids smooth handover between human and autonomous control.
- Increases overall safety by proactively identifying driver risk.
06. Multi-Model Tracking (Interacting Multiple Model – IMM)
In dynamic driving environments, the behavior of tracked objects (like vehicles, bikes, or pedestrians) can switch rapidly between different motion patterns—constant velocity, acceleration, turning, or stopping. A single motion model might not be sufficient to track these changes accurately. Interacting Multiple Model (IMM) techniques, in combination with Kalman Filters, are used to handle such complexity.
IMM uses multiple Kalman Filters simultaneously, each based on a different motion hypothesis (e.g., one assuming straight movement, another assuming turning). It continuously evaluates which model best explains the observed data and updates the final estimate accordingly. This ensures more accurate and responsive object tracking in complex scenarios like intersections or sudden lane changes.
This technique is especially useful in urban ADAS applications where traffic participants behave unpredictably. IMM frameworks powered by Kalman Filters can differentiate between normal driving, erratic behavior, and even potential collision paths with high reliability.
Key Points:
- Uses multiple filters to model different motion behaviors.
- Provides accurate tracking during sudden maneuvers.
- Adapts dynamically to changing object trajectories.
- Enhances prediction reliability in congested environments.
- Ideal for complex intersections and urban traffic handling.
07. Fault Detection and Sensor Redundancy
In safety-critical systems like ADAS, it’s essential to detect sensor faults in real time. Kalman Filters can be employed to monitor sensor consistency and detect anomalies that suggest a fault. For instance, if GPS data suddenly diverges from IMU-based estimates, the Kalman Filter can flag a fault or switch to a redundant sensor path.
By comparing predicted measurements (based on system dynamics) with actual sensor inputs, the filter calculates residuals. If these residuals exceed a threshold, it indicates that a sensor may be providing incorrect data. This enables the system to isolate the faulty sensor and reconfigure itself to maintain operation using redundant inputs.
This capability is crucial in ensuring fail-operational behavior, which is a key requirement for autonomous vehicles. It also contributes to cybersecurity, where spoofed or tampered sensor data can be detected as an inconsistency by the Kalman-based estimation model.
Key Points:
- Monitors real-time sensor consistency using residual analysis.
- Detects faulty or tampered sensors early.
- Supports system fallback using redundant sensor data.
- Enhances reliability and fault tolerance in autonomous driving.
- Critical for meeting functional safety standards (e.g., ISO 26262).
08. V2X and Cooperative ADAS
Vehicle-to-Everything (V2X) communication enables cars to share information with infrastructure, other vehicles, and cloud services. While V2X offers new sources of data, they are often asynchronous and have different latencies. Kalman Filters help fuse V2X data (like speed or intent of other vehicles) with on-board sensor data for more robust decision-making.
For example, if a nearby vehicle sends a message about its planned lane change, the Kalman Filter integrates this with camera and radar inputs to anticipate the maneuver even before it’s visible. This enhances cooperative features such as cooperative adaptive cruise control, intersection management, and platooning.
Kalman Filters make V2X data more usable by filtering network jitter, delay, or packet loss. This is vital to ensure consistency between local perception and external messages, building trust in cooperative systems.
Key Points:
- Fuses onboard sensors with V2X messages for cooperative decision-making.
- Filters time delays and inconsistencies in wireless communication.
- Enables anticipatory behavior based on shared intent (e.g., lane change).
- Supports ADAS features like cooperative ACC and safe intersection handling.
- Improves trustworthiness and usability of V2X data.
Conclusion
The Kalman Filter continues to be a cornerstone of modern ADAS technology, enabling vehicles to make sense of noisy, incomplete, and uncertain sensor data. From sensor fusion and object tracking to driver monitoring and localization, its applications are vast and critical to ensuring both safety and comfort on the road. As automotive systems become more complex and data-driven, the Kalman Filter’s ability to provide real-time, reliable estimations will remain foundational to the next generation of intelligent and autonomous vehicles.
This was about “Kalman Filter Applications in ADAS (Advanced Driver Assistance Systems)”. Thank you for reading.
Also, read:
- “Mother of All Deals”: How The EU–India Free Trade Agreement Can Reshape India’s Economic Future
- 10 Free ADAS Projects With Source Code And Documentation – Learn & Build Today
- 100 (AI) Artificial Intelligence Applications In The Automotive Industry
- 1000+ Automotive Interview Questions With Answers
- 2024 Is About To End, Let’s Recall Electric Vehicles Launched In 2024
- 2026 Hackathons That Can Change Your Tech Career Forever
- 50 Advanced Level Interview Questions On CAPL Scripting
- 7 Ways EV Batteries Stay Safe From Thermal Runaway


