Hello guys, welcome back to our blog. In this article, we will discuss the sign convention of speed and torque, what is quadrant diagram, explain the quadrant diagram for the hoist drive system, etc. Each and everything I will try to explain in a simple way.
If you have any electrical, electronics, and computer science doubts, then ask questions. You can also catch me on Instagram – CS Electrical & Electronics.
Also, read:
- Top 10 Electrical Wire Manufacturing Companies In The World
- Top Electric Vehicle Interview Questions With Answers Must Know
- What Is Wireless BMS, Battery Management System, Benefits, Working
What is Quadrant Diagram, Explain The Quadrant Diagram For Hoist Drive System
Sign Convention Of Speed Torque
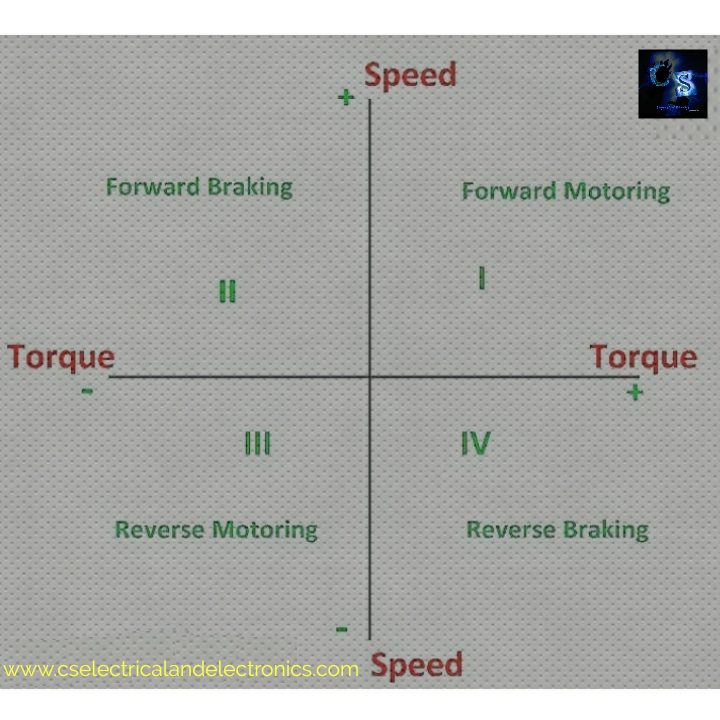
The power is positive for motoring operation and power is negative for braking operation. The speed is considered to be positive for upward movement or motor running in an anti-clockwise direction. The speed is considered to be negative for downward movement or motor running in a clockwise direction.
The torque is said to be positive if it accelerates and torque is said to be negative if it deaccelerates.
Quadrant Diagram For Hoist Drive System
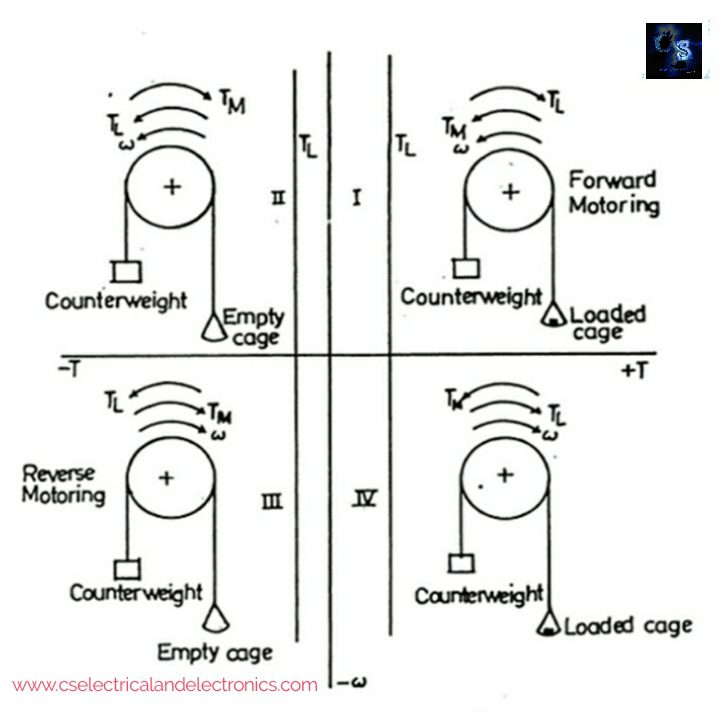
The above diagram shows a quadrant diagram for the hoist drive system. The motor always operates in two modes i.e., motoring and braking. In motoring operation, electrical energy is converted into mechanical energy whereas, in braking operation, mechanical energy is converted into electrical energy.
The hoist drive system operates in four quadrants such as, in quadrant one – forward motoring, in quadrant two – forward braking, in quadrant three – reverse motoring, and in quadrant four – reverse braking.
In quadrant one – In quadrant one, the weight of the loaded cage is greater than the weight of the counterweight, and the load torque is running in a direction that is opposite to that of rotation. In order to pull up the loaded cage, a motor must produce the torque in the anti-clockwise direction. Here, the speed is positive. The power developed is also positive because it is a motoring operation.
In quadrant two – In quadrant two, the weight of the cage is less than the weight of the counterweight. So the cage is pulled up, in order to limit the speed to the safe value, the motor must produce braking torque in a clockwise direction. The load torque is in an anticlockwise direction. Here, the speed is positive whereas the power developed is negative.
In quadrant three – In quadrant three, the weight of the cage is less than the weight of the counterweight. In order to pull up the counterweight, the motor must produce torque in a clockwise direction. The load torque is in an anti-clockwise direction. Here, the speed is negative and the power developed is positive.
In quadrant four – In quadrant four, the weight of the cage is more than the weight of the counterweight. Here the loaded cage is pulled down, in order to limit the speed to a safe level, the motor must produce the torque in the anti-clockwise direction. Here, both speed and power developed are negative.
This was the explanation of the quadrant operation of the hoist drive system. I hope this article may help you all a lot. Thank you for reading.
Tag: What is Quadrant Diagram, Explain The Quadrant Diagram For Hoist Drive System.
Also read:
- State Estimation Filters For SOC In Battery Management Systems
- From Bengaluru To 2nm: How India Is Shaping Qualcomm’s Next-Gen Chips
- Automotive Resource For Free On GitHub
- Good News for EEE and ECE Engineers: Budget 2026 and the Semiconductor Boom in India
- How China Is Redefining Electric Public Transport with Supercapacitors
- Which Industry Should EE & EC Students And Professionals Choose?
- 100+ Indian Startups & What They Are Building
- Top 20 Indian Government Hackathons In 2026