Hello guys, welcome back to our blog. In this article, I will discuss CAN vs CAN-FD vs Ethernet, how to choose the right automotive network, and when to use what.
Ask questions if you have any electrical, electronics, or computer science doubts. You can also catch me on Instagram – CS Electrical & Electronics
- Neuromorphic Computing In The Automotive: Driving The Future With Brain-Inspired Intelligence
- Why Automakers Are Building Their Own Vehicle Operating Systems
- Role Of OTA, FOTA & SOTA In Modern Vehicle Architecture
CAN vs CAN-FD vs Ethernet
The modern automobile is no longer just a mechanical marvel—it’s a complex, interconnected electronic system on wheels. With the surge in Advanced Driver Assistance Systems (ADAS), autonomous driving, infotainment, and connected vehicle technologies, the demand for fast, reliable, and secure in-vehicle communication has increased dramatically.
Three primary contenders dominate the vehicle network communication space: CAN (Controller Area Network), CAN-FD (Flexible Data-Rate), and Automotive Ethernet. Each has unique characteristics, use cases, and trade-offs. This article dives deep into the differences, advantages, and limitations of each technology, helping engineers and decision-makers choose the right protocol for specific automotive applications.
Evolution of In-Vehicle Communication
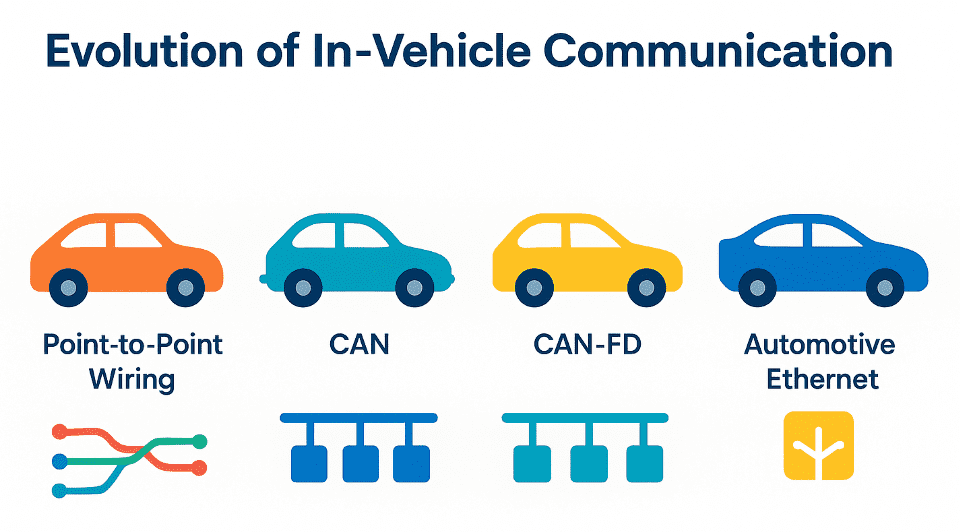
Early vehicles used point-to-point wiring to connect electronic components. As complexity grew, this approach became impractical. The solution came in the form of networked architectures using protocols like CAN, LIN, FlexRay, MOST, and now, Automotive Ethernet.
Key driving factors behind the evolution:
- Increase in the number of Electronic Control Units (ECUs)
- Real-time control requirements
- Data-heavy applications (e.g., sensors, cameras, infotainment)
- The need for functional safety (ISO 26262)
- Cost, weight, and complexity reduction
CAN (Controller Area Network)
Introduced by Bosch in 1986, CAN has been the backbone of in-vehicle communication for decades. It allows microcontrollers and devices to communicate without a host computer.
Key Features
- Data Rate: Up to 1 Mbps
- Message Length: 8 bytes
- Arbitration: CSMA/CR (Carrier Sense Multiple Access with Collision Resolution)
- Deterministic, robust, and reliable
- Two-wire differential signaling
- Ideal for real-time control applications
Typical Applications
- Engine control
- Transmission
- Body control modules
- ABS, airbags
- Power steering
Limitations
- Data throughput is low for modern applications
- Only 8 bytes of data per frame
- Latency issues with high ECU count
- No native support for security or encryption
CAN-FD (Flexible Data-Rate)
CAN-FD is an enhanced version of classical CAN, introduced in 2012 by Bosch to overcome limitations of standard CAN.
Key Improvements
- Data Rate: Up to 5-8 Mbps (in data phase)
- Payload: Up to 64 bytes per frame
- Increased efficiency and flexibility
- Backward compatible with CAN (hardware/software update needed)
Benefits
- Higher bandwidth with same physical infrastructure
- Reduced bus load by sending more data in fewer messages
- Improved support for software flashing, diagnostics, over-the-air updates (OTA)
Use Cases
- Autonomous vehicle ECUs with larger data sets
- Software and firmware updates
- Gateway ECUs
Limitations
- Still limited compared to Ethernet
- Requires hardware support (CAN-FD transceivers and controllers)
- Can increase system cost
Automotive Ethernet
Originally developed for IT networking, Ethernet has been adapted for the automotive world with real-time, deterministic enhancements (e.g., TSN – Time-Sensitive Networking).
Key Features
- Speeds from 100 Mbps (100BASE-T1) to 10 Gbps (10GBASE-T)
- Full-duplex communication
- Supports IP protocols (TCP/UDP, HTTP, MQTT, etc.)
- Long frame length (up to 1500 bytes or more with jumbo frames)
Advantages
- Extremely high bandwidth
- Scalable and future-proof
- Ideal for data-heavy applications (LiDAR, RADAR, cameras, infotainment)
- Seamless integration with cloud-based and connected services
- Supports service-oriented architecture (SOA) and AUTOSAR Adaptive
Use Cases
- ADAS/AD systems
- Infotainment and multimedia streaming
- Camera-based driver assistance
- Sensor fusion
- Vehicle-to-Everything (V2X) communication
Challenges
- Higher cost and complexity
- Requires new infrastructure (e.g., switches, gateways, twisted pair cables)
- Needs EMI/EMC shielding for higher data rates
- Training and design expertise required
CAN vs CAN-FD vs Ethernet


When to Use What?

✅ Use CAN when:
- Application requires real-time control
- Cost-sensitive environments (low/mid-range cars)
- Limited data per message (e.g., switch status, temperature)
- Legacy systems or well-tested architectures
✅ Use CAN-FD when:
- More data is needed per message
- Updating or flashing software in ECUs
- Need a bridge solution between CAN and Ethernet
- Low-mid level ADAS integration
✅ Use Automotive Ethernet when:
- High-speed communication is essential (e.g., camera, radar, V2X)
- Working with Autonomous Driving, AI, sensor fusion
- Designing next-gen E/E architecture
- You need integration with cloud, IoT, OTA updates, or security
Co-Existence in Modern Vehicles
Most modern vehicles don’t rely on a single protocol. Instead, they combine several, creating a heterogeneous network. For example:
- CAN: Powertrain and basic controls
- CAN-FD: Gateway and diagnostics
- Ethernet: Infotainment, ADAS, cameras
These networks are managed through gateways, ensuring smooth communication between different domains.
Future Trends
- Zonal Architecture: Moving away from distributed ECUs to zonal domains using Ethernet as the backbone.
- TSN Adoption: Ensures deterministic Ethernet communication suitable for real-time systems.
- SOA-based Vehicle Platforms: Automotive Ethernet enables dynamic services instead of static ECUs.
- Cybersecurity Integration: Ethernet’s support for IP-based security protocols will become crucial.
Conclusion
The choice between CAN, CAN-FD, and Automotive Ethernet is not a matter of “which is best” but rather “which is best suited” for the specific automotive application. Each has its niche and plays a vital role in vehicle architecture. Understanding their strengths and trade-offs enables smarter design, better performance, and scalability for future mobility.
As vehicles become smarter and more connected, the trend will shift toward Ethernet, especially in premium and autonomous platforms. However, CAN and CAN-FD will remain essential for reliable, real-time, and cost-effective control.
This was about “CAN vs CAN-FD vs Ethernet“. Thank you for reading.
Also, read:
- India’s GaN Chip Breakthrough: Why Gallium Nitride Could Shape the Future of Defense Electronics
- India’s Chip Era Begins: A New Chapter in Semiconductor Manufacturing
- FlexRay Protocol – Deep Visual Technical Guide
- Top 50 AI-Based Projects for Electronics Engineers
- India AI Impact Summit 2026: The Shift from AI Hype to AI Utility
- Python Isn’t Running Your AI — C++ and CUDA Are!
- UDS (Unified Diagnostic Services) — Deep Visual Technical Guide
- Automotive Ethernet — Deep Visual Technical Guide